Полёт по ArUco-меткам¶
Участники проекта¶
Команда: ГУО Средняя школа д. Черни, Брестский район, Республика Беларусь.
Автор работы: Козинцев Максим Леонидович.
Проектный наставник: Постоялко Александр Викторович.
Описание и цель проекта¶
В Беларуси ежегодно проходят соревнования по робототехнике в формате кубка. В течение года кубок проходит в городах Беларуси и завершается финалом в г.Минске. Одна из категорий — «Программируемые дроны». Максим и его наставник Александр Викторович давно хотели поучаствовать в этой категории, однако ввиду отсутствия подходящих квадрокоптеров смогли осуществить это желание только в сезоне 2021/22 — осенью 2021 года у них появилось два квадрокоптера «Пионер Мини» с комплектом аккумуляторов и зарядных устройств. Данный проект возник и развивался ходе подготовки к участию в соревнованиях, поэтому некоторые решения могут показаться не совсем логичными, но они проистекают из правил данной категории.
Проект представляет собой написание программы на Python с использованием возможностей библиотек pioneer-sdk и ArUco.
Возможности программы:
Автономный полет с использованием локальной системы координат
Уточнение точек автономного полета при помощи маркеров ArUco
При обнаружении нескольких маркеров в поле зрения происходит выбор необходимого маркера
Использование отдельных программируемые процедур после взлета и перед посадкой
Возможность циклического выполнения основной части полетного задания
Поиск ArUco-маркера, если в контрольной точке он не обнаружен.
Решаемые задачи¶
Данную программу можно использовать на соревнованиях с использованием программируемых БПЛА, где разрешается применять дополнительные маркеры. Полетные задания прописываются и корректируются легко и удобно благодаря применению системы относительных смещений от точки к точке. Также данная программа может быть использована для полетов по точкам без привязки к маркерам, по аналогии с обычными LUА-скриптами. В целом программа получилась достаточно простой и универсальной.
Этапы разработки¶
1) Взаимодействие с Пионером Мини¶
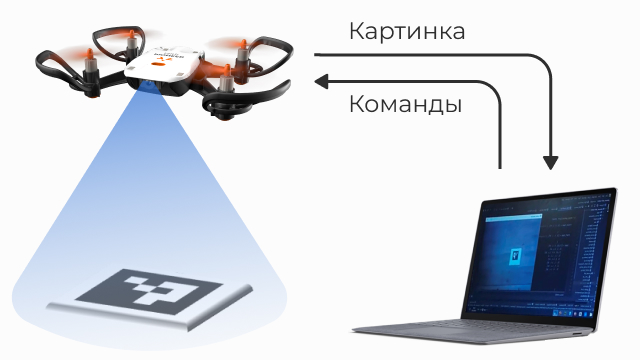
Управление квадрокоптером осуществляется путем получения изображений со встроенной камеры, обработки этих изображений на ноутбуке и отправке команд управления обратно на квадрокоптер. Связь происходит по радиоканалу с использованием технологии Wi-Fi. ArUco-маркеры располагаются на полу, соответственно, камеру на квадрокоптере необходимо повернуть в креплении, чтобы она смотрела вниз.
2) ArUco-маркеры¶
Первоначально для полетов использовалась библиотека маркеров 6х6 с размером 120х120мм, как в примере aruco_flight с сайта Геоскана Пионера. Однако, объем библиотеки в 1000 маркеров явно избыточен для нашего применения, поэтому мы перешли на библиотеку 4х4 с размером маркера 100х100мм и объемом 50 маркеров.
Такого количества маркеров вполне достаточно: в реальном задании обычно используется около десятка. Уменьшение размеров маркера немного помогает при ориентировании, когда маркер попадает в край кадра. В то же время из-за меньшего количества элементов на маркере распознавание не ухудшается.
3) Написание программы¶
Поскольку практического опыта в программировании на Python с использованием OpenCV у команды не было, программа создавалась путем поэтапной модернизации примера aruco_flight.
Первое, что было сделано, поскольку камера нашего Пионера смотрит вниз — изменение логики управления при обнаружения маркера. Вместо сложных математических расчетов со смещением по всем трем осям задача свелась к банальным двум строчкам:
command_x += k_p_xy*(x_camera)
command_y -= k_p_xy*(y_camera)
Управление по Z в данной версии производится строго по полетному заданию. В перспективе есть идея привязать высоту полета к номеру маркера.
Полетное задание теперь делится на три части:
Действия после взлета (выполняются один раз после взлета (таблица Start_task))
Основное полетное задание (может быть выполнено циклически в зависимости от переменной Laps (таблица task))
Действия перед посадкой (выполняются после основного полетного задания для выхода в зону посадки (таблица Finish_task)).
При обнаружении маркера квадрокоптер оценивает свое положение относительно него и, если смещение составляет более 20см по любой оси, выполняется процедура корректировки положения. В планах еще сделать корректировку положения по курсу, чтобы в случае каких то воздействий на квадрокоптер, он мог подкорректировать свое вращение вокруг оси Z и корректно завершить задание. В данный момент этот функционал не реализован.
Структура полетного задания выглядит так:
1task = [[0.5, 2.2, 0.7, 88],
2[0.7, 1, 0.7, 99],
3[0.2, 1.1, 1.9, 5]
4]
Каждая запись состоит из следующих полей:
1[X, Y, Z, N]
2
3# Где X, Y, Z - приращение координат по Х, Y и Z
4# N - код маркера ArUco, при обнаружении которого выполняется данный пункт полетного задания.
5# Зарезервированы следующие коды маркеров:
6# 88 - маркер с любым ArUco-кодом; 99 – маркер в конечной точке отсутствует.
Для обеспечения более точного выполнения задания в случае, если в конечной точке перемещения ожидается маркер, но в поле зрения он отсутствует, квадрокоптер набирает высоту 2 метра для расширения поля обзора.
Для контроля, какую именно стадию полетного задания выполняет квадрокоптер в данный момент, была разработана и реализована следующая система цветовой сигнализации при помощи встроенных светодиодов:
Синий – цель достигнута
Зеленый – движение к новой точке
Красный – маркер достигнут
Белый – калибровка над маркером
Желтый – поиск маркера.
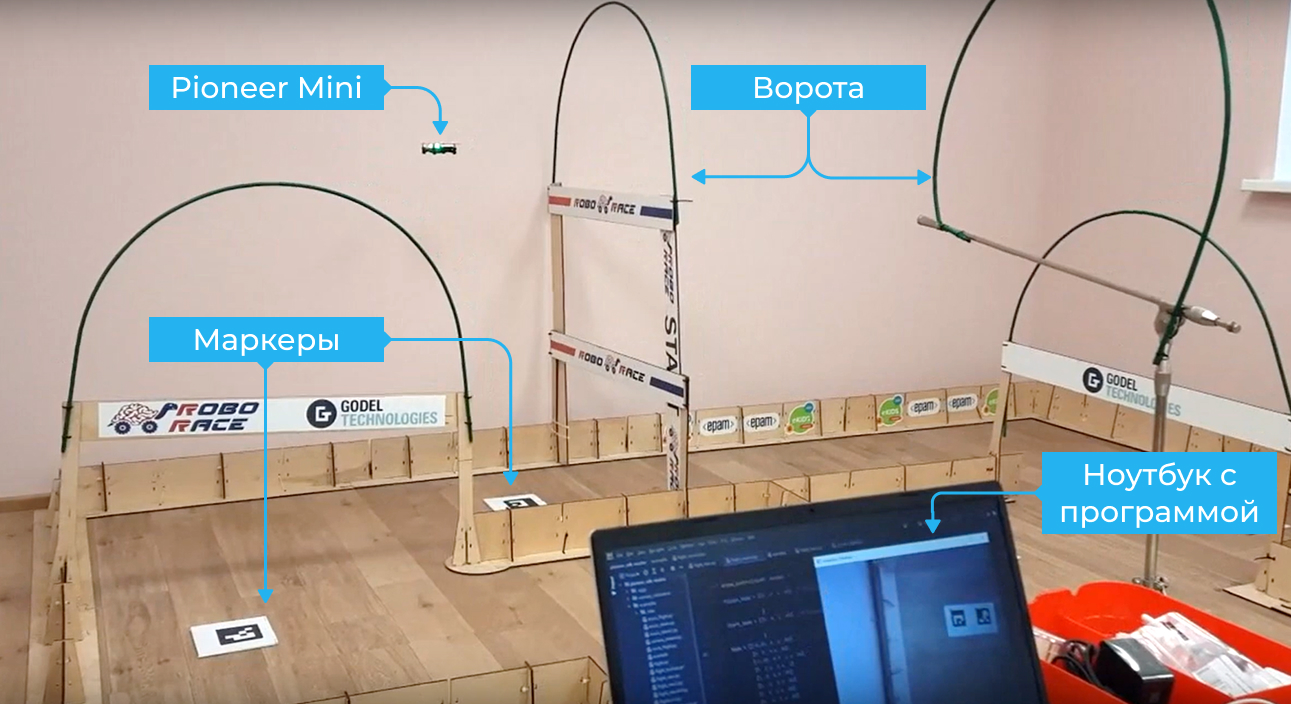
4) Практическая реализация полета¶
Для практических полетов был изготовлен набор ArUco-маркеров в виде фанерных квадратов размером 18х18см. Сами маркеры напечатаны на листах обычной бумаги А4 и закреплены при помощи скотча. Такое решение, с одной стороны, утяжеляет маркеры, не позволяя им смещаться под воздействием воздушных потоков от винтов, а с другой – позволяет легко и быстро заменить маркеры (например на маркеры другой системы и/или размера).


Остается только разложить маркеры на трассе, измерить расстояния перелетов от маркера к маркеру и написать полетное задание.
5) Выявление недостатков¶
В ходе реальных соревнований выявились следующие недостатки данной программы:
Полет над недостаточно контрастной поверхностью приводит к довольно сильным промахам. Над соревнованиях использовалось черное поле с нанесенным на него белой полосой-трассой. Информации с такого покрытия недостаточно для точного полета;
Торможение и зависание квадрокоптера в конце каждого перелета приводит к увеличению времени выполнения полетного задания;
Самое неприятное – на соревнованиях диапазон 2.4ГГц очень сильно «забит» различными устройствами (Wi-fi, Bluetooth, радиомышки, радиоуправляемые модели). В связи с этим передача видео и команд управления по Wi-fi идет с ошибками и сбоями, в результате команды исполняются неточно и с запаздыванием.
В то же время на тренировках, над поверхностью пола, имитирующей доску, в условиях отсутствия помех, программа работает достаточно чётко и предсказуемо.
Результат¶
Разработка этой программы, все более совершенствуемой от соревнования к соревнованию, принесла команде большой опыт в программировании на Python. Приходилось учиться на ходу, программировать, придумывать практические реализации идей. Также команда вполне успешно выступала на соревнованиях, пусть и без призов, но показывая реальные результаты.
Материалы проекта¶
Презентация: Полёт по ArUco-меткам
Скрипт: Полёт по ArUco-меткам