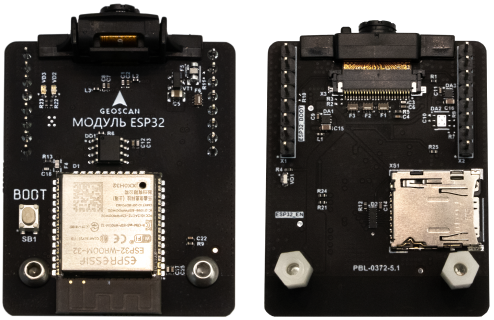
Программируемый модуль ESP32 с CV камерой¶
Модуль предназначен для передачи видеопотока и команд управления на внешние устройства с использованием WiFi. Благодаря этому открываются возможности ранее доступные только на квадрокоптере Пионер Мини, а именно:
Управление с мобильного телефона через приложение Geoscan Jump;
Блочное программирование;
Другие функции приложения Geoscan Jump.
Дополнительно, модуль предоставляет следующий функционал:
Программирование на Python с использованием библиотеки pioneer_sdk;
Связь с другими устройствами работающие на WiFi, в том числе нейроинтерфейсом и роботом ТРИК и другими Пионерами;
Поворотная камера для отработки кейсов с управлением жестами и аэрофотосъемки;
Запись логов и видео на SD карту;
Открытая прошивка для программирования на С++;
Технические характеристики¶
Процессорный модуль – ESP32 WROOM32;
Дальность связи – до 50 метров;
Протокол соединения - UART;
Макс. разрешение - 640×480: 25 fps — цветное;
Напряжение - 3,3 V;
Размеры - 145 × 135 × 39 мм;
Вес - 18 грамм;
Важно
Обратите внимание. Прошивка и параметры автопилота для работы с модулем ESP-32 отличаются от стандартных! Cкачайте версию прошивки для работы с модулем ESP-32.
Обратите внимание, на текущий момент на данной прошивке не работает управление с помощью стиков в приложении Jump. В ближайшее время данная возможность будет добавлена.
Для возврата к управлению с помощью пульта радиоуправления - загрузите стандартную прошивку и параметры автопилота.
Прошивка модуля ESP-32¶
Обновление прошивки выполняется с помощью программы NJET. Cкачать актуальную версию можно по ссылке - Njet_GUI_1.6.0.
Перед началом прошивки модуль ESP32 должен быть отключён от платы подключения доп.модулей. Выполните следующие инструкции для прошивки модуля ESP32.
С помощью Pioneer Station убедитесь, что версия автопилота соответствует рекомендуемой версии. Подробная инструкция по обновлению прошивки автопилота в разделе: Обновление прошивки автопилота.
Предупреждение
Использование cтандартной прошивки автопилота в процессе обновления ESP32 может привести к выводу платы автопилота из строя! Обязательно загрузите рекомендуемую версию для работы с ESP32!
Подключите Пионер к компьютеру кабелем USB и запустите утилиту NJET
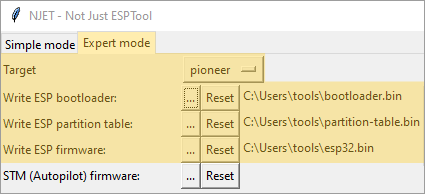
Во вкладке Expert Mode убедитесь, что программа автоматически выбрала необходимые для прошивки файлы (После распаковки архива они находятся в папке tools). Если этого не произошло - выберите файлы самостоятельно нажав «…» и указав путь до файла. Убедитесь, что в графе Target выбран pioneer.
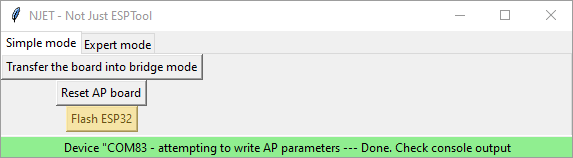
Во вкладке Simple Mode нажмите кнопку Transfer the board into bridge mode для перевода платы автопилота в режим моста.
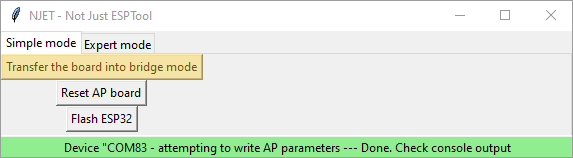
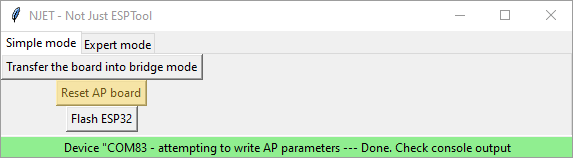
После сообщения об успешном выполнении - нажмите кнопку Reset AP board для выполнения перезагрузки.
Подключите модуль в соответсвующие разъёмы с предварительно зажатой кнопкой «BOOT». Убедитесь, что на модуле загорелся зелёный светодиод.
Нажмите кнопку Flash ESP32.
Дождитесь окончания работы программы. После завершения, в консольном окне будет следующее сообщение: Leaving… Staying in bootloader. finished, returned None. Выполните перезагрузку.

Проверьте список доступных WiFi-сетей на вашем устройсте.