Настройка параметров автопилота¶
Параметры полета квадрокоптера в ручном и автоматическом режиме можно тонко настроить, используя программу Pioneer Station. Для настройки «Пионера» должен быть подключен к компьютеру. Для перехода к настройке откройте вкладку «Параметры автопилота», текущие параметры должны отображаться в правой части окна.
Примечание
Настоятельно рекомендуем обновить параметры вашего «Пионера». Параметры автопилота «Пионер Мини» и базового «Пионера» различаются имейте это в виду. Это связано с различной электронной начинкой квадрокоптеров.
Внимание
Перед загрузкой параметров, обязательно обновите прошивку автопилота, это очень важно! Как это сделать вы можете просмотреть в разделе Обновление прошивки автопилота.
Загрузка параметров на Базовый Пионер¶
Скачайте Параметры АП для Pioneer Base в удобную для вас папку. В большинстве случаев, рекомендуемые параметры находятся в архиве с прошивкой и имеют расширение .properties.
Подключитесь к Пионеру с помощью Pioneer Station. Нажмите кнопку «Открыть из файла»

В диалоговом окне укажите путь к папке с параметрами, после чего выберите необходимый файл с расширением .properties и нажмите «Открыть».
В открывшемся окне, вы увидите отличающиеся значения. Изображение снизу является примером. В колонке «Автопилот» отображаются текущие параметры, в столбце «Файл» находятся новые значения параметров которые будут изменены. Нажмите кнопку «ОК».
Для загрузки новых параметров нажмите кнопку «Cохранить изменения на автопилот»
 и дождитесь окончания перезагрузки.
и дождитесь окончания перезагрузки.

В верхнем меню Pioneer Station присутствуют кнопки  и
и  . Каждая из них загружает в квадрокоптер стандартный набор параметров для полета, соответственно, в локальной системе позиционирования и полёта с помощью модуля оптического позиционирования.
. Каждая из них загружает в квадрокоптер стандартный набор параметров для полета, соответственно, в локальной системе позиционирования и полёта с помощью модуля оптического позиционирования.
Изменение текущих параметров¶
Перейдите во вкладку «Параметры автопилота». В первом столбце таблицы приведены названия параметров. Назначение каждого из них описано в крайнем правом столбце «Описание». Во втором столбце отображаются текущие значения параметров автопилота.
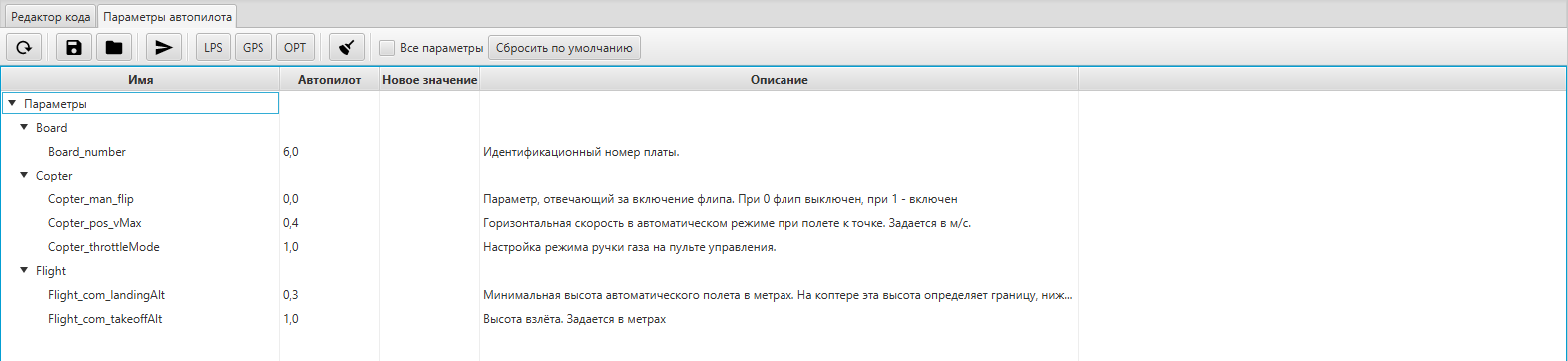
Если вы хотите поменять какое-либо из них, введите новое значение в столбец «Новое значение» и нажмите Enter. Завершив редактирование, не забудьте сохранить изменения, нажав кнопку «Cохранить изменения на автопилот»
Также вы имеете возможность открыть полный список параметров автопилота отметив чекбокс «Все параметры»
Опасно
Самостоятельное изменение некоторых параметров может непреднамеренно привести к фатальным ошибкам работы автопилота. Если вы не знаете что это за параметры, лучше их не изменять.
Примечание
Если вы хотите вернуться к заводским настройкам, нажмите кнопку сбросить по умолчанию над таблицей и подождите пока «Пионер» перезапустится.
Настройка режима «Возврат домо黶
В Пионере предусмотрен режим возврата домой (RTL) в экстренных ситуациях. Домашней точкой считается место, где был произведён запуск двигателей. Квадрокоптер перейдёт в режим возврата в следующих случаях:
При низком заряде на аккумуляторе
При отсутствии сигнала от системы навигации
При отсутствии сигнала c пульта радиоуправления
В автопилоте режим RTL настраивается с помощью следующих параметров:
Flight_com_navSystem - параметр указывает какую систему навигации следует использовать при полёте. При значении 0 – используется GNSS (спутниковая система навигации). При значении 1 – локальная система (в случае использовании модуля ИК-навигации или системы Геоскан Локус). При значении 2 – квадрокоптер будет использовать модуль оптического позиционирования.
Flight_com_rtlVoltage - параметр устанавливает напряжение в V ниже которого включается возврат домой. Для отключения возврата по напряжению параметр необходимо установить в 0. Событие о низком напряжении генерируется в течении полёта однократно.
Flight_com_landingVol - параметр задаёт напряжение ниже которого производится экстренная посадка. Стоит учитывать, что посадка будет произведена, прервав возврат домой, где бы ни находился квадрокоптер, если напряжение опустится ниже указанного.
Flight_com_autoFlightT - параметр задаёт длительность автоматического полёта. Полёт считается автоматическим в случае пропадания связи с пультом радиоуправления.
Copter_flyWithoutRc - параметр позволяющий запускать квадрокоптер автономно без пульта радиоуправления. Автопилот не начнёт выполнять скрипт в случае, если пульт ДУ не связан с приёмником или выключен (значение 1) или проигнорирует его отсутствие (значение 0).
Flight_com_landAtHome - включение посадки при возврате домой. Данный параметр определяет, надо ли садиться при достижении точки дома в режиме возврата (значение 1) или нужно зависнуть над точкой дома (значение 0).
Flight_com_homeAlt - высота над точкой дома в метрах, использующаяся в режиме возврата домой. Коптер зависнет на этой высоте над точкой дома.
Flight_com_rtlAltMode - параметр определяющий режим возврата домой. Квадрокоптер долетит до точки дома с удержанием высоты, после чего совершит посадку (значение 0), либо будет постепенно снижаться при возврате (значение 1).
Flight_com_returnAlt - высота возврата в домашнюю точку.
Настройка параметров при замене на не заводские моторы¶
Если вы заменили двигатели на Пионере, они могут отличаться по электрическим характеристикам и не пройдут предстартовые проверки при подготовке к взлёту. За неё отвечают параметры:
Copter_motorCheckTime - время проверки скорости оборотов двигателей на старте в секундах. Для отключения проверки установите значение параметра 0
Copter_startRpmMax - максимальное количество об/мин для проверки на старте
Copter_startRpmMin - минимальное количество об/мин для проверки на старте
Copter_startRpmSigma - максимальное расхождение между измеренными оборотами двигателей, при превышении которого считается, что двигатели работают неравномерно.
При получении команды на взлет (первые 5 секунд) проводится ещё одна проверка:
Copter_stallRpm - предельная величина оборотов, после которой считается, что произошел срыв синхронизации, и двигатели отключаются. Для нестандартных двигателей можно использовать максимально возможные холостые обороты двигателя (для этого нужно умножить kv двигателя на напряжение аккумулятора)
В случае замены двигателей на более мощные вам также может понадобиться настроить PID коэффициенты. Неправильные PID - причина заметных вибраций и колебаний коптера в полёте.
Чтобы настроить PID коэффициенты, используйте следующие параметры:
Copter_xyRate_ki - интегральная часть регулятора. Его нужно уменьшить, если квадрокоптер нехотя отзывается на управление, и увеличить, если заметны низкочастотные колебания.
Copter_xyRate_kp - пропорциональная часть регулятора. Его можно уменьшить, если присутствует заметное перерегулирование и высокочастотные колебания (коптер дрожит во время зависания в одной точке). Если квадрокоптер плохо отзывается на управление, значение параметра нужно увеличить.
Примечание
Для оценки допустимых оборотов, запишите логи полёта в ручном режиме управления и просмотрите график rpm в канале данных motor-x. Подробнее в разделе Работа с логами автопилота