Обновление прошивки ESP-32¶
Контроллер ESP-32 отвечает за передачу видеопотока и передачу команд управления с телефона на квадрокоптер. Для обновления прошивки ESP-32, необходимо воспользоваться одной из специальных утилит. Алгоритм работы с каждой из них описан в инструкции ниже.
Важно
Перед началом обновления прошивки убедитесь, что версия автопилота: Pioneer Mini 1.6.9202. В противном случае прошивка может привести к выходу квадрокоптера из строя. Проверить можно в Pioneer Station. Для этого подключите квадрокоптер по USB, в правом нижнем углу программы в строчке «Версия АП» должно быть Pioneer Mini 1.6.9202. При необходимости - выполните обновление.
Примечание
Программа PioneerStation должна быть закрыта во время работы Njet или ESPtool.
Обновление с помощью NJET¶
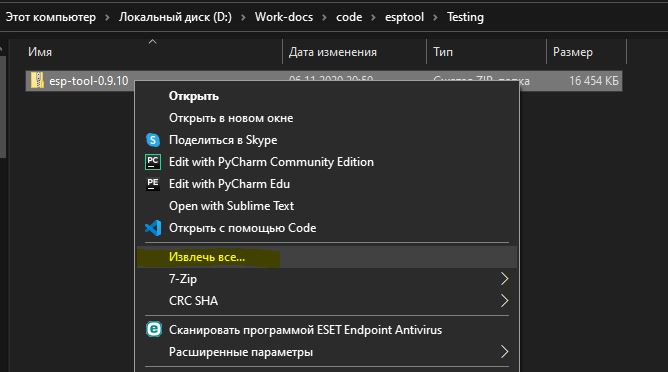
Скачайте архив с программой Njet_GUI_1.6.0 и разархивируйте его в удобное место, нажав правой кнопкой мыши и выбрав опцию «Извлечь всё…».
Подключите Пионер Мини к компьютеру через Micro-USB разъем, нражмите кнопку включения. При этом начнёт мигать левый светодиод.
Перейдите в разархивированную папку и запустите из неё файл njet_gui.exe. Предварительно убедитесь, что программа Pioneer Station закрыта. Дождитесь запуска приложения.
В поле Target выберите pioneer_mini
В полях Write ESP bootloader / partition table / firmware укажите путь к соответствующим файлам. После разархивации они находятся в папке «tools».
В полях ESP / STM Baudrate выберите значения 57600
Установите галочку в чекбоксе Reset ESP to bootloader.
Остальные настройки оставьте без изменений. Нажмите кнопку FlashESP32 и дождитесь обновления прошивки. Она может занимать до 5 минут. После появления сообщения «Hard resetting via RTS pin…» в командной строке закройте утилиту и перезагрузите Пионер Мини.
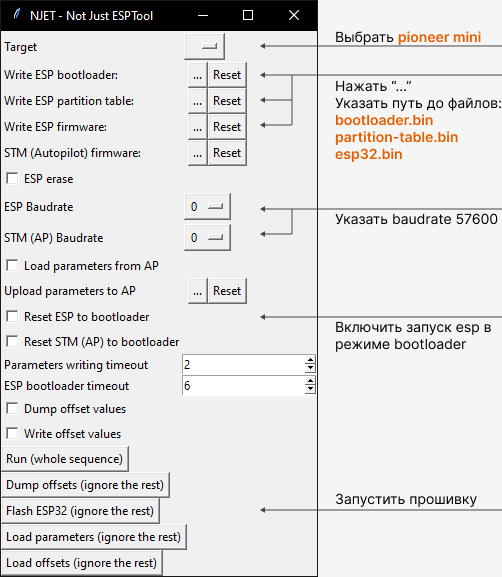
NJET позволяет загрузить параметры автопилота. Для этого отметьте чекбокс Load parameters from AP после чего в строке Upload parameters to AP укажите путь к параметрам автопилота для текущей версии прошивки и нажмите кнопку Load parameters. Обратите внимание, что при загрузке параметров чекбокс Reset ESP to bootloader должен быть отключён.
Обновление с помощью ESPTool¶
Подключите Пионер Мини к компьютеру через Micro-USB разъем и нажмите кнопку включения. Левый светодиод при этом должен начать моргать.

Скачайте архив ESPTOOL, в нем содержится утилита для прошивки контроллера ESP-32
ESPTOOL с прошивкой ESP 0.5.6 и параметрами автопилота 9202
Разархивируйте ZIP архив, нажав на него правой кнопкой мыши и выбрав «Извлечь все…».
Откройте разархивированную папку и запустите из неё файл runiterative.bat
Внимание
В файле par.properties содержатся параметры автопилота. Они загрузятся автоматически, в данной версии программы.
Дождитесь обновления прошивки ESP-32, она может занимать до 5 минут.
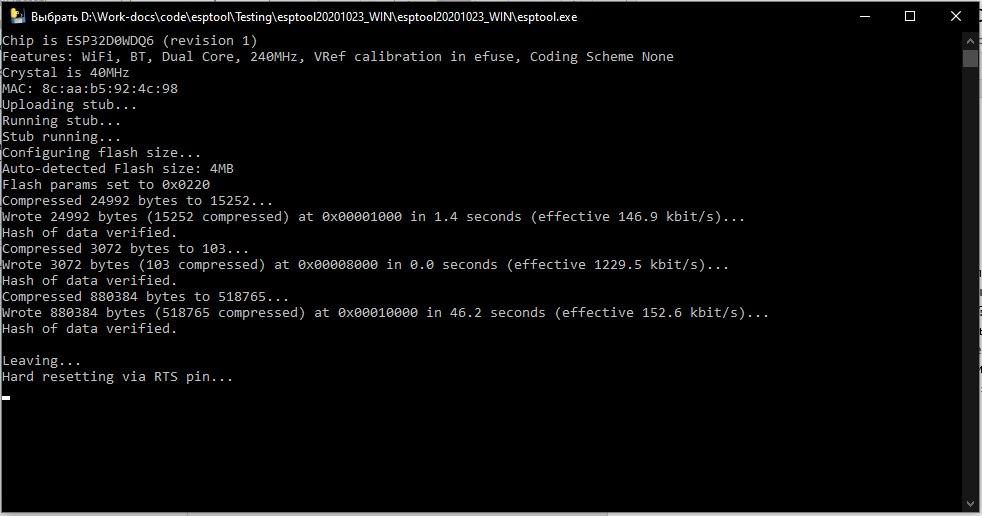
После появления сообщения «Hard resetting via RTS pin…» закройте утилиту нажатием на «крестик».
Внимание
Приложение не должно закрываться автоматически, дождитесь надписи указанной выше.
Перезапустите Пионер Мини нажатием на кнопку включения.

Квадрокоптер готов к работе.
Внимание
Если процесс обновления не удаётся завершить из-за ошибки >>>OFFSET_ERROR<<< вам необходимо произвести перекалибровку акселерометра. Чтобы это сделать, перейдите на страницу Калибровка акселерометра.
В ESPTOOL 2.0 в случае возникновение аналогичной проблемы надо нажать любую кнопку.
Проверка после обновления¶
Перед началом убедитесь:
Что параметры загружены верно.
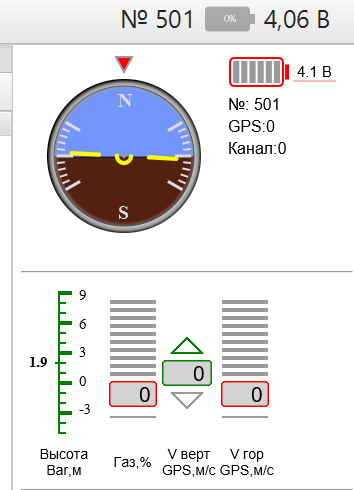
Проверить загрузили ли вы конкретные параметры 9202 или нет, можно через номер борта, для этого отключите коптер по USB нажав кнопку «подключение», затем заново подключите, если у вас «номер борта» изменился на 2906. (пример на снимке экрана ниже, там 501) При работе с ESPTOOL 2.0 и pioneer_sdk номер борта должен поменяться на 2906.
При необходимости можно загрузить по ссылке ниже или на странице Настройка параметров автопилота Пионера Мини
Параметры автопилота 9202 для прошивки АП 1.6.9202
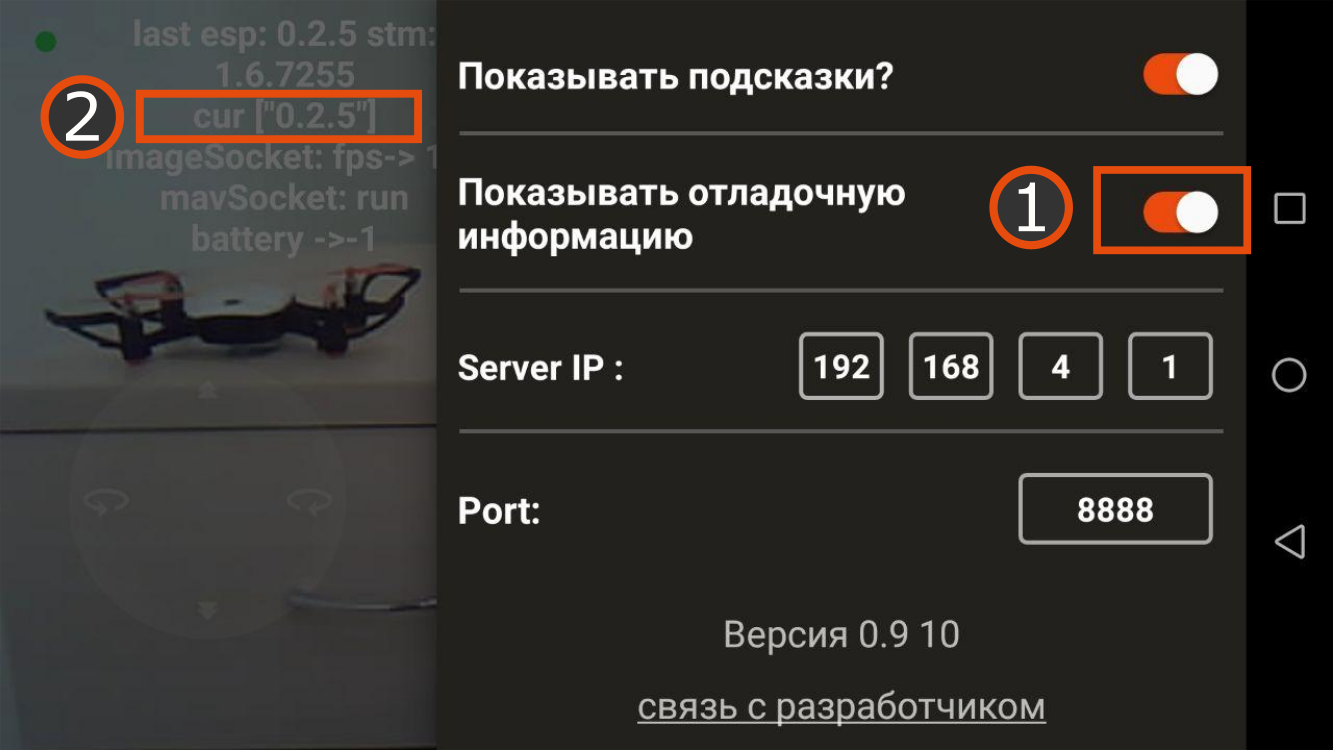
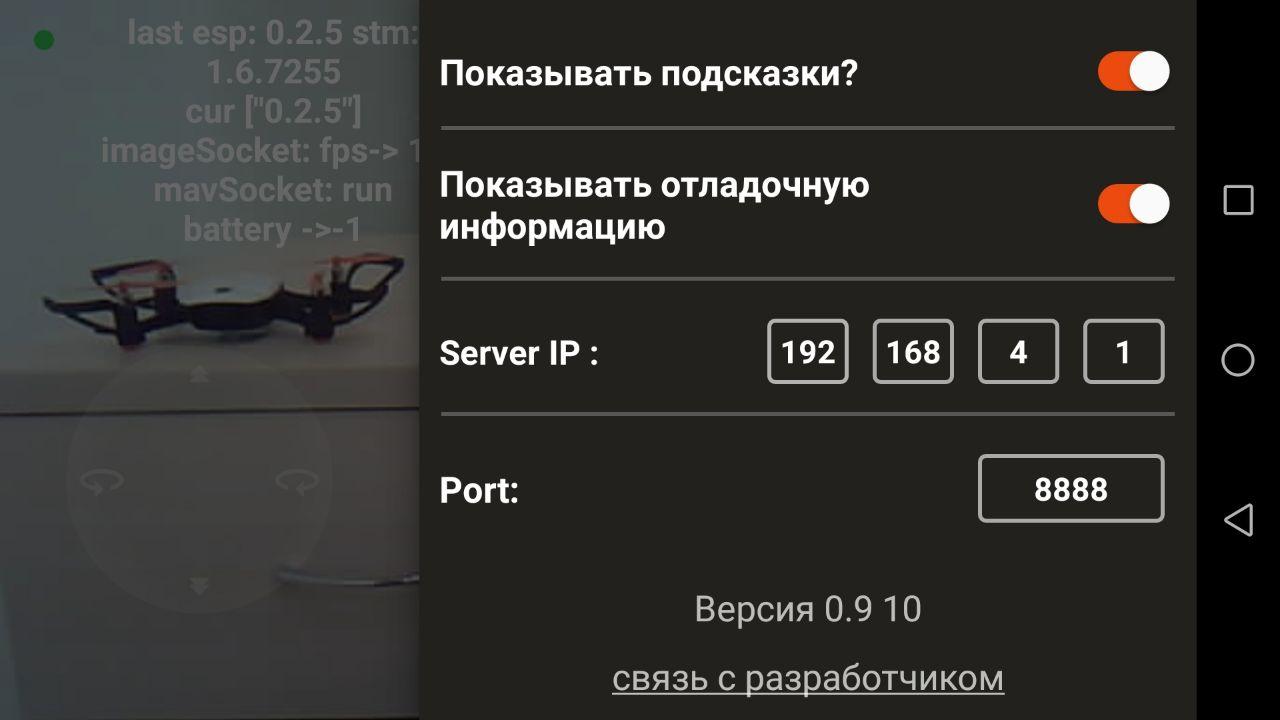
Что вы обновили прошивку ESP-32, как описано выше. Для проверки откройте Jump, в расширенных настройках включите отображение отладочной информации. В строке напротив «cur» должна быть надпись [«0.5.6»] или выше.
Также проверить, прошло ли обновление успешно через имя WiFi сети. Если сеть называется «Pioneer_Mini» и после слова «Mini» отсуствует набор случайных цифр и букв, значит обновление не прошло.
После успешного обновления имя сети должно измениться например на «PioneerMini5afg415bb».
У вас установлено приложение Geoscan Jump последний версии. Номер версии можно проверить в самом приложении в вкладке «Расширенные настройки». Должна быть версия 1.14 или выше.
История обновлений¶
Список изменений версии 0.5.6
09.02.22 вышла новая прошивка ESP-32 0.4.5 Для корректной работы квадрокоптера, вам обязательно нужно обновить прошивку данного контроллера.
Список изменений версии 0.4.5
Добавлена возможность записи видео с квадрокоптера на SD-карту.
Добавлена возможность подключения к внешней сети WiFi.
Выход в OpenSource
Исправлены баги предыдущих версий.
06.10.21 вышла новая прошивка ESP-32.
Новая версия прошивки ESP-32 и обновленный Geoscan Jump, качественно улучшают:
Скорость передачи видеопотока;
Увеличено количество кадров в секунду;
Скорость передачи команд управления;
Стабильность WiFi соединения;
Совместимость с большим количеством телефонов.
Новая версия параметров автопилота версии 0014:
Улучшена стабильность взлета и посадки;
Квадрокоптер быстрее отключается при переворотах и столкновениях;
Управление в режимах полета Althold и Stabilize стало более отзывчивым;
Убран баг с автозапуском LUA скрипта.