Для корректной работы всех систем Пионера Мини необходимо устанавливать последнюю актуальную версию прошивки. Процедура обновления и настройки происходит с помощью программы Pioneer Station.
Скачать актуальную версию программы можно из раздела Pioneer Station.
Важно
Перед осуществлением первого полета, обязательно обновите прошивку и параметры автопилота «Пионера Мини». Полет с устаревшей версией прошивки автопилота ниже чем 1.6.9202 может быть небезопасен.
Инструкция по обновлению прошивки автопилота «Пионера Мин軶
Подключите квадрокоптер к компьютеру с помощью кабеля micro-USB и включите квадрокоптер нажав на кнопку сбоку. Левый светодиод сзади должен начать мигать.
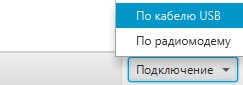
Запустите программу «Pioneer Station». В левом нижнем углу нажмите кнопку «Подключение» и выберете «По кабелю USB»
Примечание
Если по истечении 10 секунд окно программы не обновилось, попробуйте переподключить квадрокоптер и перезапустить программу. Если это не помогло, попробуйте скачать и установить драйвер порта, после чего переподключите «Пионер Мини» и перезапустите программу.
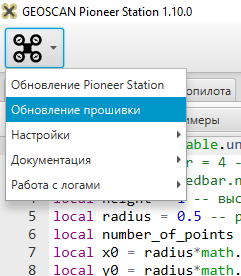
В верхнем правом углу нажмите иконку «квадрокоптера» и выберете «Обновление прошивки»
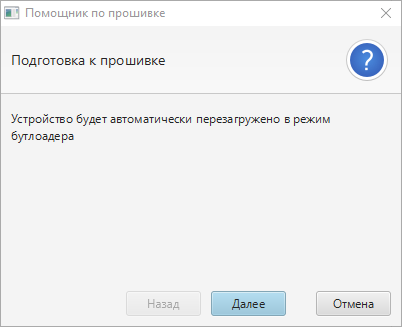
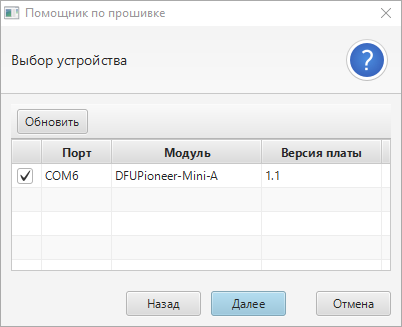
В открывшемся окне нажмите «Далее». Коптер перейдёт в в режим загрузчика. Обратите внимание, как поменялась цветовая индикация на Пионере. В следующем окне нажмите «Обновить» и выберете модуль «DFUPioneer-Mini-A» это и есть базовая плата «Пионера Мини».
Примечание
Если при выборе устройства квадрокоптер не отображается в окне, нажмите кнопку «Обновить» еще раз.
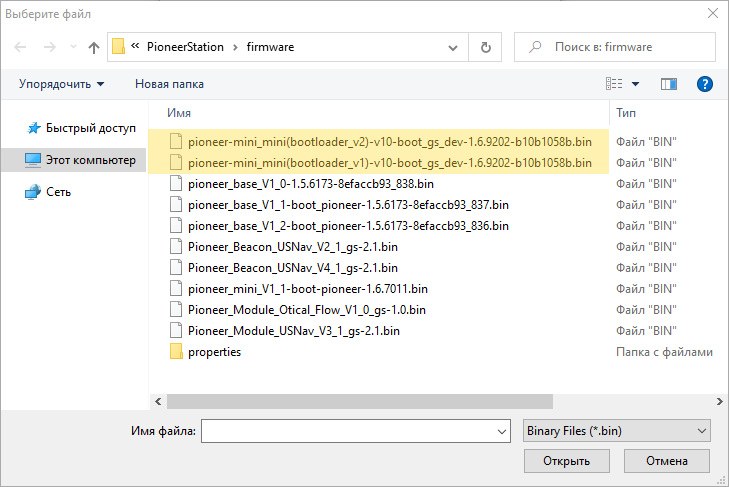
В следующем окне нажмите «Из файла» и укажите путь к ранее скачанному файлу pioneer_mini_V1_1-boot-pioneer-1.6.92xx.bin
Внимание
Обратите внимание версия прошивки должна быть 1.6.9202 или старше а также соответствовать версии загрузчика. Определить версию загрузчика поможет цветовая индикация. Если на данном шаге (после перехода в режим загрузчика) горит только правый зелённый светодиод - необходимо выбрать версию с подписью bootloader_v1. Если кроме зелёного светодиода горит красный - выберите версию с подписью bootloader_v2.
Нажмите Прошить. Обновление может занимать до нескольких минут в зависимости от вашего ПК.
Внимание
Не прерывайте соединение USB между коптером и ПК во время обновления, это может привести к серьезным проблемам и временному выходу квадрокоптера из строя!
Дождитесь окончания прошивки, это может занять несколько минут. После завершения нажмите «ОК», после чего отключите питание и затем заново включите квадрокоптер нажатием на кнопку на корпусе. Левый задний светодиод должен периодически мигать фиолетовым (или желтым) цветом.
Заново подключитесь к квадрокоптеру в стандартном режиме по USB и проверьте версию АП. Если прошивка прошла успешно в столбце «Версия» вы увидите значение не меньше чем 1.6.9202. Если в графе «Отказы» осталась ошибка RESTART_REQUIRED - повторите перезагрузку.
После обновления прошивки автопилота, вам необходимо обновить параметры автопилота. Вы можете сделать это автоматически при обновлении второго контроллера ESP-32, либо вручную на странице Настройка параметров автопилота Пионера Мини.
Совет
Отказ UNPROTECTED не влияет на полет, это служебное уведомление для разработчиков. На пользовательский опыт это никак не влияет. Отказ RESTART_REQUIRED пропадает через 2 перезагрузки, если этого не проиходит - напишите в техническую поддержку.
Если у вас возникли вопросы по изменению тех или иных параметров, вы всегда можете обратиться в техподдержку написав на почту support@geoscan.aero или в telegram-канал.