Подготовка к программированию Pioneer Mini на Python¶
Данная страница посвящена общей настройке среды для программирования PyCharm. Здесь описано, как установить всё необходимое ПО, подключить проект pioneer_sdk, настроить квадрокоптер для корректной работы с ПК.
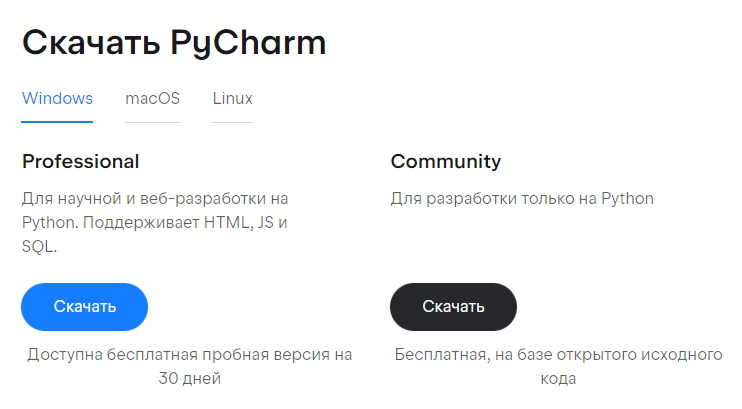
PyCharm — это интеллектуальная Python IDE с полным набором средств для эффективной разработки на языке Python. Выпускается в двух вариантах – бесплатная версия PyCharm Community Edition (рассматриваемая далее) и платная PyCharm Professional Edition. PyCharm выполняет проверку кода в реальном времени, и автодополнение (в том числе основываясь на информации, полученной во время исполнения кода). Кроме того, доступна работа с Git.
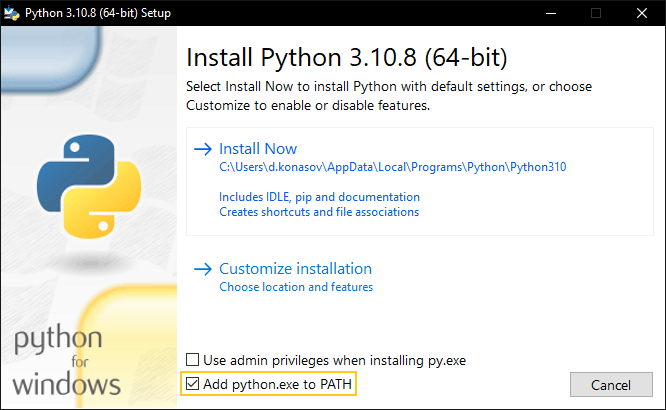
1. Прежде всего необходимо установить Python на ваш компьютер. Для этого перейдите на сайт.
Выберите актуальный релиз из списка и нажмите Download. Внизу страницы, в разделе Files выберите свою операционную систему.
Примечание
Библиотека pioneer_sdk работает с версиями python 3.7 - 3.10. На данный момент рекомендуется скачивать версию из указанного диапазона.
Важно
Обратите внимание на то, что при установки python необходимо выбрать пункт Add Python to PATH
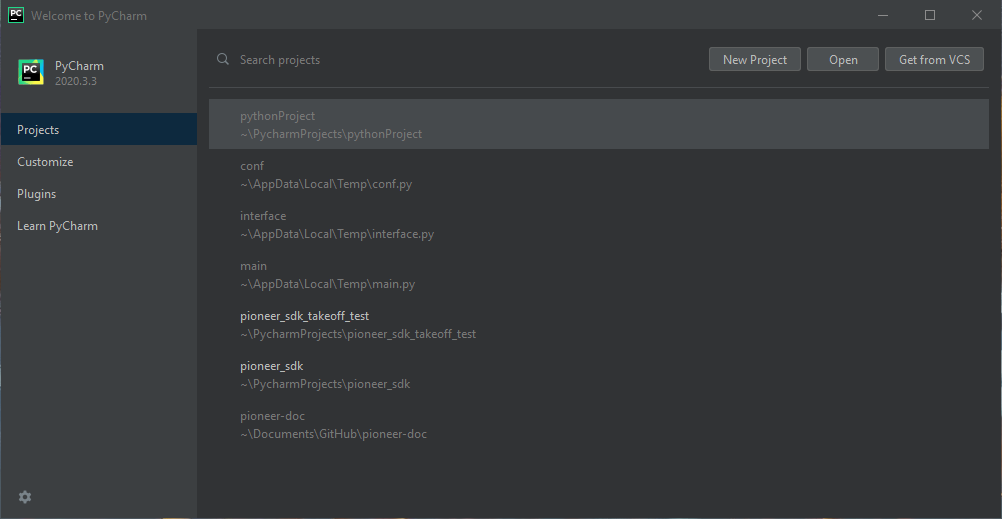
Запускаем PyCharm. При открытии программы нас встречает стартовое окно, в котором можно увидеть следующие вкладки:
Поиск и созданные ранее проекты для быстрого доступа;
Вкладки создания и открытия проектов;
Настройка среды;
Установка различных плагинов;
Обучение от PyCharm;
Перейдём к созданию проекта, выбрав опцию „New Project“
В верхней строке Location выберем путь для сохранения проекта.
В строке New environment using выберем опцию Virtualenv для создания виртуального окружения.
Создавая проект для Python, нужно выбрать его окружение. Иначе говоря, нужно ограничить видимость мест, в которых он будет искать установленные библиотеки для проекта. Целесообразно использовать виртуальное окружение в таких случаях:
Если в двух и более проектах необходимо использовать разные версии одной библиотеки. Установленные стандартным образом библиотеки разных версий будут стирать друг друга и всегда будет оставаться только один экземпляр библиотеки. При создании виртуального окружения библиотеки устанавливаются индивидуально для каждого проекта.
Если вы пользуетесь чужим компьютером, то вам могут запретить доступ к папке, в которой хранятся необходимые библиотеки. В случае использования виртуального окружения для передачи проекта другому пользователю достаточно выполнить лишь одну команду, которая создаст список используемых библиотек. А получателю, соответственно, нужно будет выполнить одну команду с этим списком для установки всех библиотек.
Как проверить, что для проекта создано виртуальное окружение?
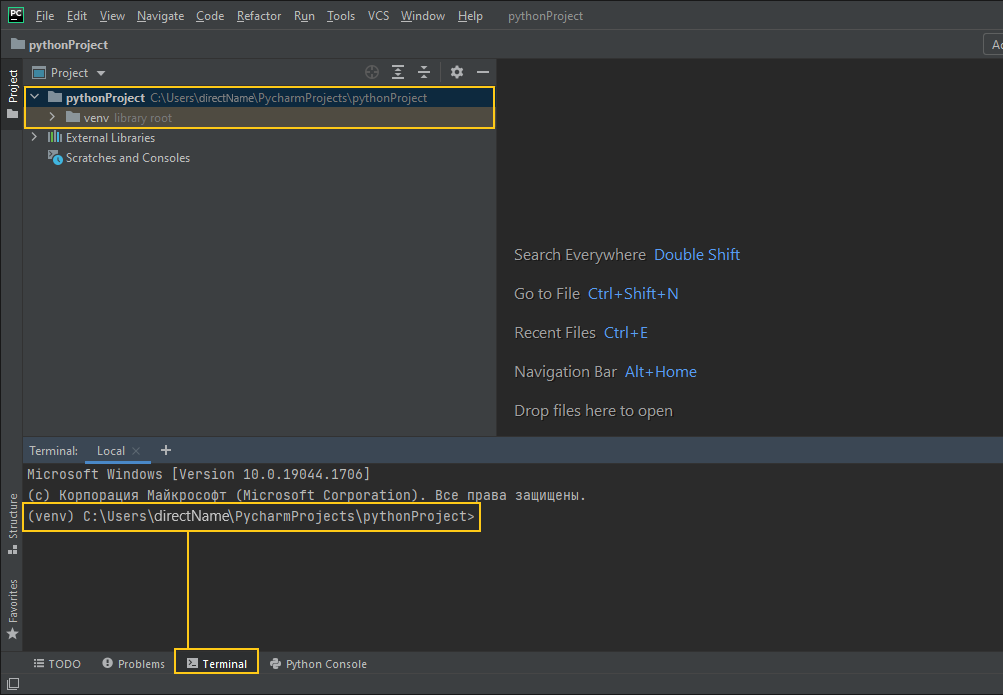
После создания проекта и настройки окружения открывается следующее окно:
Слева расположено дерево текущего проекта. Обратите внимание, что в корневой папке с названием проекта должна появиться папка с названием venv (virtual environment). В нее будут устанавливаться все библиотеки. Внизу рабочей области можно увидеть терминал, в котором тоже указано, что директория, в которой мы находимся, является виртуальной.
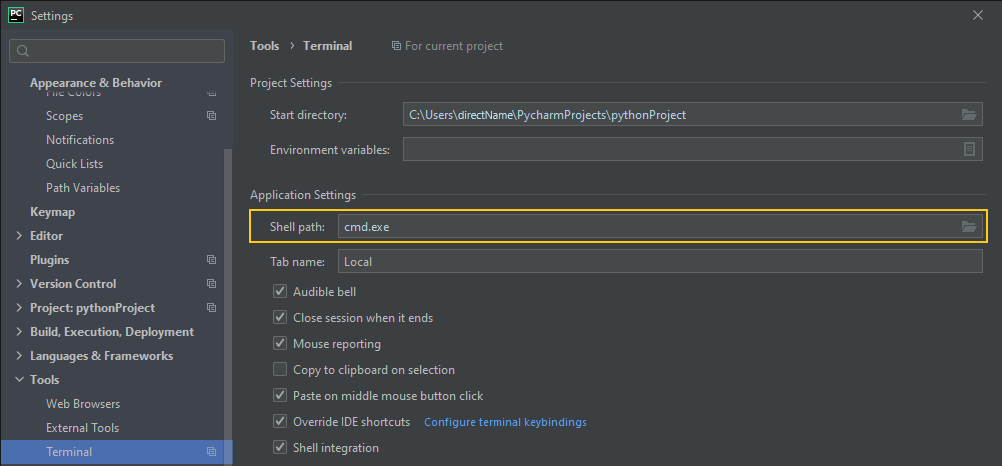
Если все действия выполнены верно, но созданный проект не является виртуальным - откройте настройки PyCharm(Ctrl + Alt + S, либо File → Settings). В дереве слева выберите раздел Tools → Terminal и убедитесь, что в графе Shell path выбрано cmd после чего создайте новый проект.
5. Все библиотеки добавляются в проект с помощью pip install. Создадим проект, в котором планируется использование библиотеки pioneer_sdk.
Для этого в терминале PyCharm выполним одну из команд:
Для работы с Pioneer Mini в первую очередь необходимо проверить актуальность его прошивки автопилота, ESP32 и параметров автопилота. Полный список необходимого ПО с инструкциями описан в начале страницы.
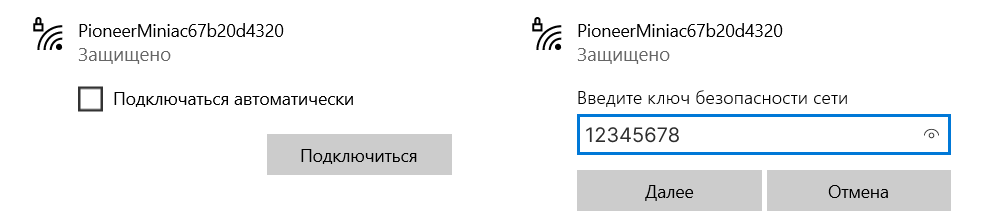
Следующим шагом включаем Pioneer Mini и подключаемся к нему по Wi-Fi. Имя сети каждого коптера уникально, но пароль у всех одинаковый: «12345678».
Внимание
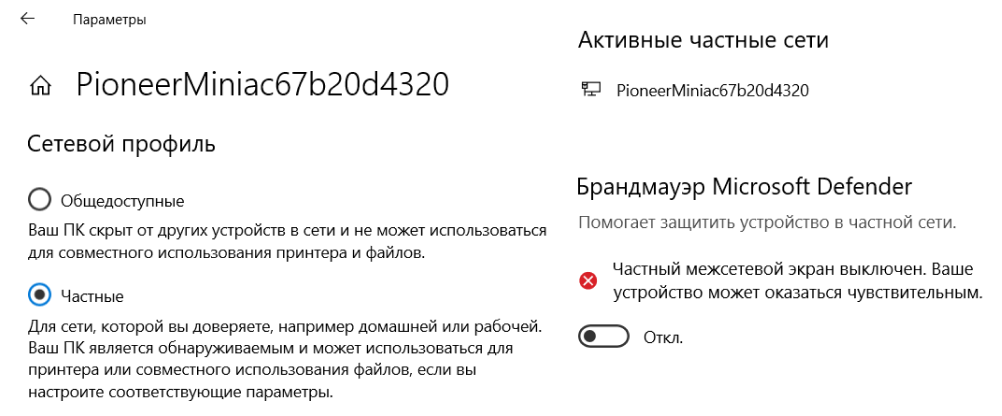
Обратите внимание: профиль сети в настройках Windows должен быть частным, а не общественным. В противном случае передача данных между устройствами не будет работать должным образом! Кроме того, для данной сети необходимо отключить брандмауэр Windows.
1. Теперь коптер готов выполнять скрипты. Самое время разобраться, как их запускать! С базовыми скриптами можно ознакомиться, обратившись к примерам в библиотеке на GitHub.
Более подробный разбор предоставлен в документации.
В качестве примера возьмём скрипт camera_stream.py.
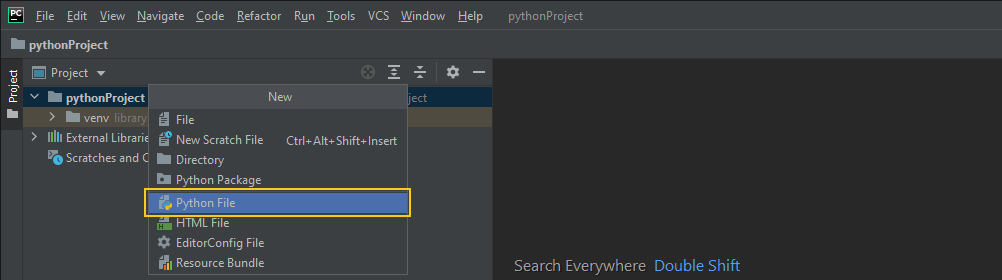
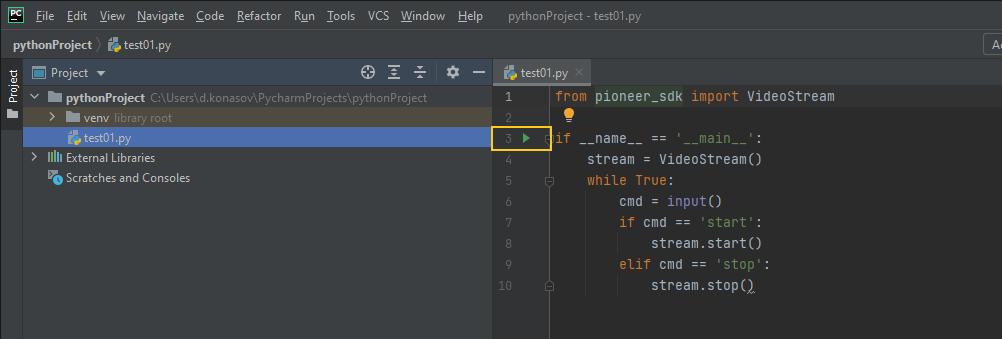
В проетке создаём новый файл (Alt+Insert), либо File → New. Выбираем тип файла Python File и указываем произвольное название.
После создания файл откроется для редактирования и будет доступен в дереве проекта слева. Копируем содержимое скрипта camera_stream.py в наш документ. Как мы видим, первой строкой является import из ранее установленной библиотеки pioneer_sdk. Для запуска скрипта достаточно нажать Ctrl + Shift + F10 либо нажать на пиктограмму с зеленым прямоугольником. Остановка скрипта выполняется по нажатию Ctrl + F2, либо нажатием на иконку с красным квадратом.
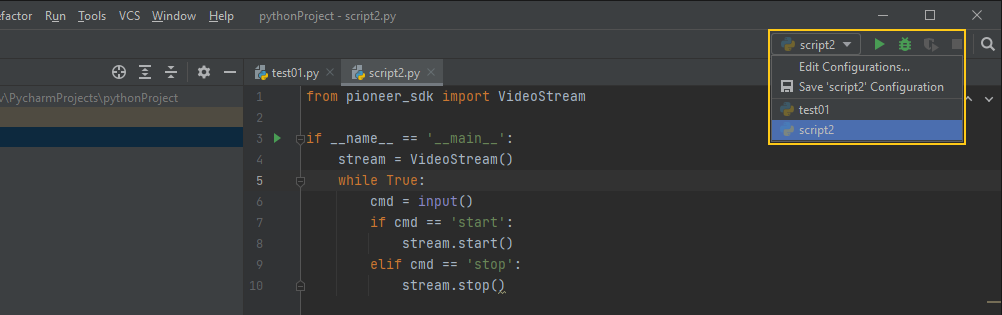
После первого запуска данный скрипт автоматически добавится в список конфигураций. При наличии нескольких скриптов в проекте всегда следите, какой из них выбран в конфигурации для запуска. Запускаемый код не всегда соответствует открытому в текущий момент!